
By Ashini K Ekanayake
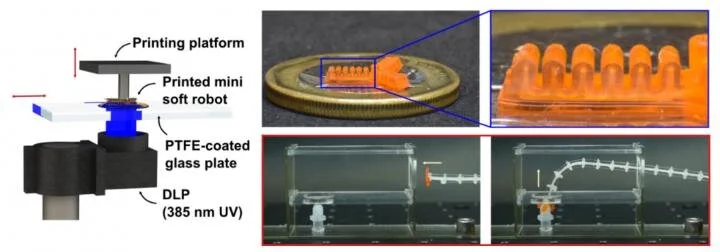
There has been a growing need for scientists to devise means of constructing softer robots which are more versatile and flexible compared to their more fixed and rigid counterparts. The most prevalent concern at this stage is to develop the robot at smaller scales, such as within the millimeter range, mainly arising from the difficulty and complexity in creating fine parts at such a small size. That is, until recently, thanks to a team of researchers from Singapore and China, from the Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech), and Zhejiang University (ZJU) respectively. The team has managed to develop a special 3D printing process using digital light projection (DLP) to develop pneumatic actuators for soft robots from a size of 2 millimeters to 15 millimeters, and components with the size of approximately 150-350 micrometers.
This new method enhances the efficiency of creating smaller soft robots, which are well-suited for the navigation of closed off spaces, as well as for manipulating smaller objects. The application of these small robots are varied, from areas such as medical technology to maintaining jets. The main introduction the team from the aforementioned universities has made is the presentation of a generic process flow for guiding the DLP 3D printing of these miniature pneumatic actuators. This newer method will act as an easier and more resource-friendly alternative to the existing method of molding and soft-lithography. Lead researcher of the research Project, Associate Professor Qi (Kevin) Ge from SUSTech, commented that they “introducted a new paradigm for systematic and efficient tailoring of the material formulation and key processing parameters” in order to “ ensure reliable printing fidelity and mechanical performance in the printed products”.
Breakdown of the method of DLP 3D printing
The DLP 3D printing process commonly involves photo-absorbers being added into polymer solutions to enhance printing resolutions in horizontal and vertical directions. However, if too many of these absorbers are added, the elasticity of the material will rapidly degrade, and this is highly detrimental to the effectiveness and success of these soft robots’ ability to sustain large deformations. Hence, to achieve the desired results and avoid sacrificing durability in potential soft robots, numerous informed decisions were made. Firstly, the team ensured that they selected a photo-absorber which had a good absorbance at the wavelength of the projected UV light, and subsequently carried out mechanical performance tests to determine the appropriate material. Afterwards, the team characterized the curing depth and XY fidelity in order to identify the suitable combination of exposure time and thickness of the sliced layers. By doing so, the process flow allowed researchers to develop a 3D printing system which involved multiple materials in order to fabricate a variety of miniature and structurally diverse soft pneumatic robotic actuators.