
Project Shiok
Project done for OSIM to explore the usability of a fully-automatic robotic massager to mimic a masseuse hand movements at the comfort of user's own bed.


Completed and Assembled 3D Models of the Shiok Robot Massager with all the inner parts shown

The joy when all the 3D printed parts are completed and ready to be assembled!





The heart of It all
Held in my hand was the heart of the entire device, which contains 4 sensors, 4-axis motion capability, and an accurate pressure sensor fusion coupled to the special massaging head courtesy of OSIM. Designing this takes many iterations as the 4-axis of motions all intersect, leaving very little gaps in between the mechanical parts. On the contrary, there are so much rooms for electronics we decided to keep the Sparkfun's big motor driver from our previous iteration.

One final adjustments to install the wheel before we can test run the robot!
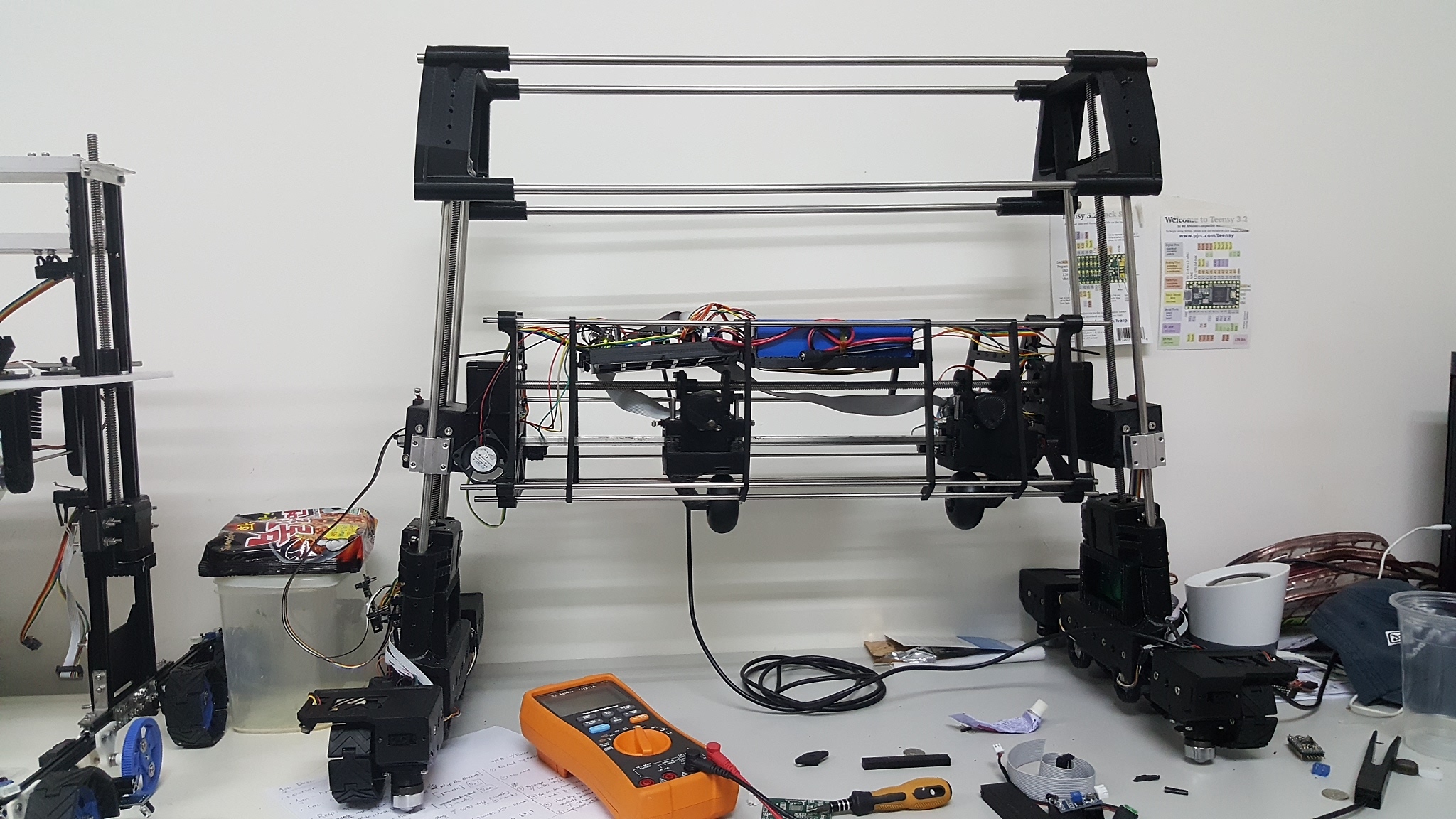
Testing all the electronics to ensure all the connections are in place and all 10 motors and 30 different sensors work properly.
dynamic pressure sensing demo
Above is the inner workings on how the robot can keep the pressure constant as it moves along the user's body contour up and down. Please pardon the motor noise as the steppers driver were not calibrated properly yet when we recorded this.